

快速导读:
新闻动态
低速环链电动葫芦现有高度检测及群吊同步系统
编辑:北京凌鹰
浏览:492
添加时间:2022-11-14 10:52:57
低速环链电动葫芦主要应用在附着式升降作业安全防护平台、船体、储罐等大型结构件的起吊作业中,一般为几个乃至数十个群吊使用。
目前,环链电动葫芦基本上不进行高度检测。通用的是仅有极限限位,采用的是机械按压的限位开关,即在链条的首末端安装一个弹簧或其他弹性材料,在环链电动葫芦本体上安装两个行程开关或微动开关(一个控制上限位,一个控制下限位)。当链条运行过程中,链条首端或末端的弹簧撞倒限位开关,即触发限位功能。
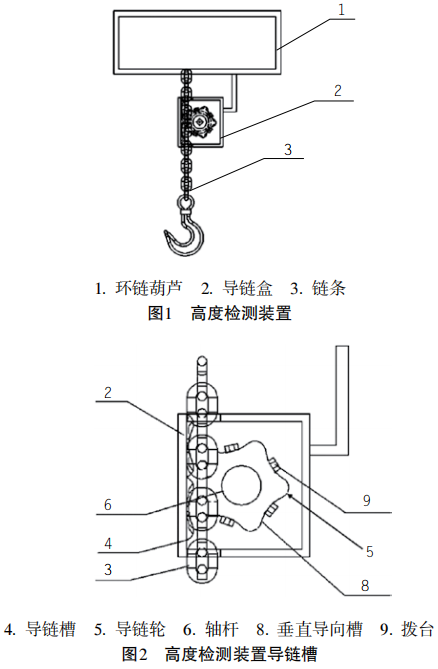
外挂高度检测装置,也有一些研究,如图1和图2所示,环链葫芦的壳体下方布置一个导链盒,导链盒内布置链轮,与链条啮合,导链轮的转动带动凸轮限位器工作,从而实现高度测定。这种测速方法使得葫芦的有效起升高度降低,并且导链盒需要有葫芦壳体刚性连接,不然影响链条和导链轮的啮合,造成检测精度下降。导链盒的存在又使得葫芦垂直方向体积变大,增加了包装、运输的难度。
重量同步控制系统:也有一些同步是通过重量差来实现的,例如《附着式升降脚手架升降机同步控制系统应用技术规程》规定,每个低速环链电动葫芦配备一个载荷传感器和单控箱,一个总控箱控制若干个单控箱,如图3所示。当两个传感器载荷差超过±15%时发出警报,当两个传感器载荷差超过±30%时停机。
上一条:辅助手拉葫芦检维修装置的不足及优化方向
下一条:电动葫芦电气控制回路修改后的效果跟进及日后计划
相关产品:
版权所有:北京市凌鹰起重机械厂 京ICP备11048170号
传真:010-58043523 邮箱:beijinglingying@126.com
地址:北京市昌平区东小口 邮编:102200 网站地图
